-
溫始地送風(fēng)風(fēng)盤 —— 革新家居空氣享受的藝術(shù)品
-
溫始·未來生活新定義 —— 智能調(diào)濕新風(fēng)機
-
秋季舒適室內(nèi)感,五恒系統(tǒng)如何做到?
-
大眾對五恒系統(tǒng)的常見問題解答?
-
五恒空調(diào)系統(tǒng)基本概要
-
如何締造一個舒適的室內(nèi)生態(tài)氣候系統(tǒng)
-
舒適室內(nèi)環(huán)境除濕的意義
-
暖通發(fā)展至今,怎樣選擇當(dāng)下產(chǎn)品
-
怎樣的空調(diào)系統(tǒng)ZUi值得你的選擇?
-
五恒系統(tǒng)下的門窗藝術(shù):打造高效節(jié)能與舒適并存的居住空間
湖南工業(yè)機器人力控搬運
達(dá)寬科技的機器人力控軟件配備了靈活的超限報警功能,允許用戶針對每個監(jiān)測方向設(shè)定兩級報警閾值。此外,軟件擁有超限自動退出功能。一旦監(jiān)測到超出設(shè)定的安全值,系統(tǒng)不僅會發(fā)出警報信號,還將自動中斷裝配流程,確保傳感器和工件的安全。該軟件提供了一個高度靈活的參數(shù)管理系統(tǒng),內(nèi)置了多組力控參數(shù)和負(fù)載辨識參數(shù)的保存功能。用戶可以為每組參數(shù)設(shè)定個性化的終止條件,以滿足特定應(yīng)用場景的需求。此外,我們的系統(tǒng)允許多組力控參數(shù)調(diào)用同一個負(fù)載參數(shù)設(shè)置,簡化了配置過程,同時確保了在力控調(diào)節(jié)過程中對負(fù)載特性的一致性理解,無論面對何種工況變化,都能快速適應(yīng)。機器人力控技術(shù)增強了機器人對外部變化的應(yīng)對能力,達(dá)寬科技的技術(shù)讓自動化生產(chǎn)更加高效。湖南工業(yè)機器人力控搬運
智能倉儲已經(jīng)成為現(xiàn)代物流行業(yè)的重要組成部分,機器人力控技術(shù)在這一領(lǐng)域的應(yīng)用越來越。通過精細(xì)控制機器人的施力,機器人力控可以確保在搬運和堆垛過程中精確控制每一物品的姿態(tài)和位置,從而避免因操作不當(dāng)而導(dǎo)致貨物損壞或誤放。機器人力控還可以幫助機器人適應(yīng)不同類型的物品,無論是重量較重的物品,還是外形特殊的物品,機器人都能夠根據(jù)需要自動調(diào)整施力,進(jìn)行精確搬運。達(dá)寬科技的機器人力控系統(tǒng),為智能倉儲提供了強大的技術(shù)支持,提升了倉儲系統(tǒng)的自動化和智能化水平,減少了人工干預(yù),提高了倉儲效率和安全性。遼寧協(xié)作機器人力控優(yōu)勢機器人力控技術(shù)提高了生產(chǎn)效率,達(dá)寬科技為企業(yè)提供高效、安全的自動化解決方案,提升了整體運營水平。

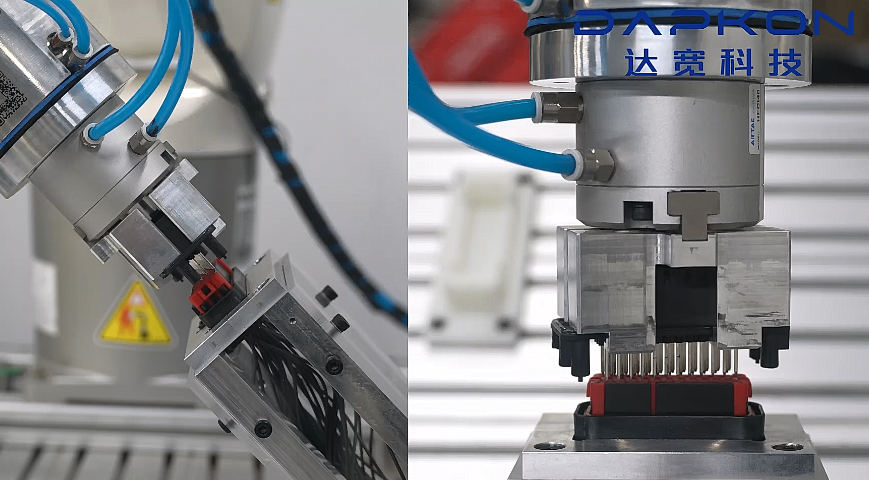
本文我們將以KUKA工業(yè)機器人為例,介紹如何基于達(dá)寬平臺級機器人力控大腦裝配汽車ECU控制器插頭35p線束。首先,使用工具坐標(biāo)系精確示教線束接口的初始位置。35針腳連接器因其眾多的針腳和較大的接觸面積,在傳統(tǒng)裝配過程中會產(chǎn)生較大的干擾外力。這不僅要求機器人具有極高的裝配精度,而且裝配過程中的干擾外力也可能造成影響。例如,在裝配過程中,如果因來料誤差等原因,機器人施加過大的力量,有損壞連接器的風(fēng)險。如何在不損壞連接器的前提下,精確地將線束連接到指定位置?在測試過程中,我們發(fā)現(xiàn)依賴位置判斷可能導(dǎo)致在工裝偏移或誤差時損壞連接器。而依賴力判斷可能因干擾外力誤判而認(rèn)為已到達(dá)指定位置,但這種方法能確保連接器不受損害,提升安全性。因此,結(jié)合位置和力的雙重判斷是更為穩(wěn)妥的解決方案。
素材六:機器人力控提升多任務(wù)處理能力機器人力控技術(shù)能夠讓機器人在執(zhí)行多個復(fù)雜任務(wù)時保持高效和精確。傳統(tǒng)工業(yè)機器人通常只針對單一任務(wù)進(jìn)行優(yōu)化,而機器人力控通過動態(tài)調(diào)整機器人的施力和動作,使其能夠在不同任務(wù)之間靈活轉(zhuǎn)換,無論是精細(xì)裝配、力道控制還是碰撞避讓,機器人都能夠根據(jù)具體需求自動調(diào)整。這種多任務(wù)處理能力極大提升了生產(chǎn)線的柔性和適應(yīng)性。達(dá)寬科技的機器人力控系統(tǒng),不僅能夠應(yīng)對不同類型的工作任務(wù),還能夠優(yōu)化工作流程,提高生產(chǎn)線的整體效率和多樣性,滿足客戶對生產(chǎn)靈活性和快速響應(yīng)的需求。達(dá)寬科技的機器人力控解決方案提升了生產(chǎn)過程中的操作靈活性,為企業(yè)創(chuàng)造更高的效益。
在現(xiàn)代智能化制造中,多個機器人常常需要協(xié)同工作以完成復(fù)雜的生產(chǎn)任務(wù)。機器人力控技術(shù)在這一過程中扮演了重要角色。通過精確的力感知和控制,機器人能夠與其他機器人無縫協(xié)作,避免碰撞和,確保各個機器人的工作能夠高度協(xié)調(diào)。這不僅提高了生產(chǎn)線的整體效率,也減少了因操作不當(dāng)引發(fā)的生產(chǎn)瓶頸。達(dá)寬科技的機器人力控系統(tǒng),憑借其精細(xì)的力控制技術(shù),幫助多個機器人在同一生產(chǎn)線中實現(xiàn)高效協(xié)同,提升了生產(chǎn)線的協(xié)作效率和靈活性,使企業(yè)能夠更好地應(yīng)對多變的生產(chǎn)需求。機器人力控技術(shù)讓生產(chǎn)線更加靈活,達(dá)寬科技的技術(shù)能夠?qū)崟r響應(yīng)變化,確保生產(chǎn)順暢。浙江協(xié)作機器人力控抓取
機器人力控技術(shù)能顯著提高自動化生產(chǎn)效率,達(dá)寬科技的解決方案幫助用戶優(yōu)化操作精度,節(jié)省時間和成本。湖南工業(yè)機器人力控搬運
本文我們將以ABB工業(yè)機器人為例,介紹如何基于達(dá)寬平臺級力控大腦裝配服務(wù)器的多種線束。首先,使用工具坐標(biāo)系精確示教多個線束接口和多個服務(wù)器接口的對應(yīng)初始位置。我們注意到,該服務(wù)器有多種規(guī)格的接口,我們演示了HDMI、USB、電源和網(wǎng)線的裝配,這四種線束是不同的接口,線束粗細(xì)也不同。使用工裝夾持線束接口,分別到達(dá)指定點位。面對這種裝配過程中的微小偏差和不規(guī)則性,達(dá)寬機器人力控系統(tǒng)采用了基于柔性力控的自適應(yīng)補償技術(shù)。這項技術(shù)利用六維力傳感器實時監(jiān)測力的微小變化,并控制機器人實時微調(diào)其位置和姿態(tài),在特定方向上減少力,從而讓接口能夠準(zhǔn)確對接。湖南工業(yè)機器人力控搬運
- 湖北智能力控系統(tǒng)優(yōu)點 2025-05-29
- 江蘇機器人柔性力控系統(tǒng)設(shè)計 2025-05-29
- 中國香港機器人柔性力控系統(tǒng)軟件 2025-05-29
- 中國香港打磨力控系統(tǒng)定制 2025-05-29
- 河南力控系統(tǒng)調(diào)試 2025-05-29
- 江蘇智能柔性力控系統(tǒng)方案 2025-05-29
- 中國臺灣力控系統(tǒng)使用方法 2025-05-29
- 浙江機器人力控系統(tǒng)廠家 2025-05-29
- 浙江打磨力控系統(tǒng)調(diào)試 2025-05-28
- 上海達(dá)寬科技力控系統(tǒng)方案 2025-05-28
- 江蘇機器人柔性力控系統(tǒng)設(shè)計 2025-05-29
- 重慶智能操控液晶屏升降器安裝 2025-05-29
- 上海定制通信系統(tǒng)開發(fā)集成一般多少錢 2025-05-29
- 黃浦區(qū)數(shù)據(jù)定向分析商家 2025-05-29
- 綜合的SMT貼片加工ODM加工 2025-05-29
- 棲霞區(qū)購買電商平臺代運營 2025-05-29
- 寶山區(qū)定制AUTOSAR工具鏈推薦 2025-05-29
- 浙江數(shù)字會議系統(tǒng)液晶屏升降器經(jīng)銷售 2025-05-29
- 浦東新區(qū)弱電機房新風(fēng)排煙工程 2025-05-29
- 廣東倍聯(lián)德邊緣計算使用方向 2025-05-29