合肥高精度汽車面漆檢測設備價格
15s內采集3000幀圖像,使用不同角度光線檢查車身漆面情況,數據表明此套系統可改善82%車身噴涂質量和客戶滿意度。2、德國寶馬2007年寶馬Dingolfing工廠針對reflectCONTROL漆膜缺陷檢測系統進行測試,其視覺系統由一臺大屏和四臺200w相機組成,每個位置采集8幀圖像,通過4臺機器人并聯使用。終在60s節拍內完成30個位置檢測,檢出率在98%以上(缺陷小直徑)。3、德國梅賽德斯-奔馳2007年奔馳Rastatt工廠使用ISRAVISION公司CarPaintVision系統進行缺陷檢測測試,每套系統含兩個側面機器人和一個水平面機器人,在60s節拍內完成全車掃描,終獲得(缺陷小直徑)。總結基于機器視覺的自動化漆面缺陷檢測系統,不受人工主觀性和汽車顏色等外界環境的影響,極大地提高了生產效率并改善了噴涂質量。這一具有革新意義的系統利用機器視覺來提升汽車行業的質量控制。合肥高精度汽車面漆檢測設備價格
汽車面漆檢測設備
所述凹槽54內的所述第三轉軸51末端固定設置有與所述凹槽54端壁上固定設置的內齒圈52嚙合的第三齒輪53。有益地,所述聯動裝置98包括所述機身10頂壁內設置的轉動腔33,前后兩個所述diyi轉軸22均貫穿所述轉動腔33且所述轉動腔33內的所述diyi轉軸22外表面固定設置有限位塊24,所述轉動腔33內可轉動的設置有與前后兩個所述蝸輪34均嚙合的蝸桿32,所述轉動腔33頂壁內可轉動的設置有與所述手動輪27固定連接的第四轉軸31,所述轉動腔33內的所述第四轉軸31末端固定設置有與所述蝸桿32外表面固定設置的第三錐齒輪29嚙合的第四錐齒輪30,手動轉動所述手動輪27半周,此時所述第四轉軸31帶動所述第四錐齒輪30轉動,從而帶動所述第三錐齒輪29轉動,從而帶動所述蝸桿32轉動,從而帶動所述蝸輪34轉動,所述蝸輪34轉動帶動所述diyi轉軸22轉動半周。有益地,所述轉動腔33左右兩側對稱設置有儲液腔28,左右兩個所述儲液腔28分別盛放油漆與拋光液,左右兩個所述儲液腔28之間固定設置有三通閥56,所述三通閥56左右兩側通過所述diyi連通管55與所述儲液腔28連通,所述三通閥56底部通過所述第二連通管57連通所述儲液腔28。黃石非隧道式汽車面漆檢測設備質量好價格憂的廠家具備高精度缺陷三維形貌測量能力。
傳統圖像算法中特征提取主要依賴人工設計的提取器,需要有專業知識及復雜的參數調整過程,分類決策也需要人工構建規則引擎,每個方法和規則都是針對具體應用的.泛化能力及魯棒性較差。具體到缺陷檢測的應用場景,需要先對缺陷在包括但不限于顏色、灰度、形狀、長度等的一個或多個維度上進行量化規定,再根據這些量化規定在圖像上尋我符合條件的特征區域,并進行標記。傳統圖像處理有很多算法庫,如Halcon、VisionPro和OpenCV等,一般采用編程語言調用算法庫的形式來實現。常用的經典檢測算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1種邊緣檢測算法,設定了信噪比準則定位精度準則單一邊緣響應準則來提高邊緣檢測精度。為滿足這了條準則.CANNYJ在一階微分算子的基礎上,增加了2項改進.即非極大值抑制和雙閾值。非極大值抑制能控制多邊緣響應和邊緣定位精度;雙閾值能減少邊緣的漏檢率。
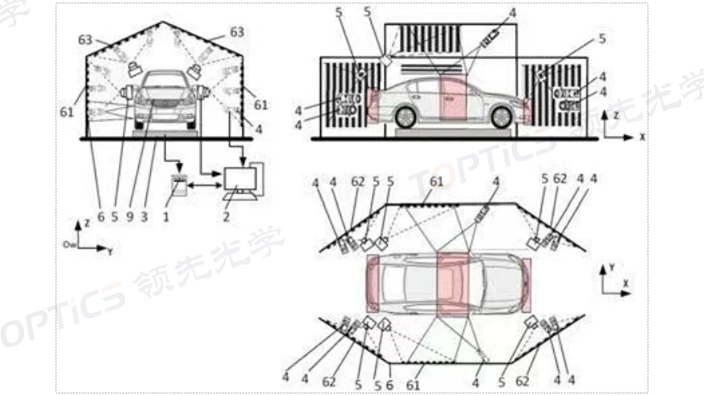
1)讀取橫條紋圖像組,對橫條紋圖像分別進行橫向條紋分割得到橫向亮條紋圖像和橫向暗條紋圖像,針對橫向亮條紋圖像進行二值化、邊緣腐蝕,得到橫向亮條紋檢測區域,在橫條紋圖像組中分別分割出橫向亮條紋灰度檢測區域,對橫向亮條紋灰度檢測區域進行二值化與特征提取,提取得到橫向亮條紋中的外觀缺陷;同樣依據上述處理過程可得到橫向暗條紋圖像中的外觀缺陷;步驟(2)讀取豎條紋圖像組,對豎條紋圖像分別進行橫向條紋分割得到豎向亮條紋圖像和豎向暗條紋圖像,針對豎向亮條紋圖像進行二值化、邊緣腐蝕,得到豎向亮條紋檢測區域,在豎條紋圖像組中分別分割出豎向亮條紋灰度檢測區域,對豎向亮條紋灰度檢測區域進行二值化與特征提取,提取得到豎向亮條紋中的外觀缺陷;同樣依據上述處理過程可得到豎向暗條紋圖像中的外觀缺陷;步驟(3)讀取漫射均勻圖像,對漫射均勻圖像進行二值化、特征提取、特征篩選操作后,提取得到漫射均勻圖像中的外觀缺陷;步驟(4)外觀缺陷整合,將步驟(1)中提取得到的外觀缺陷、步驟(2)中提取得到的外觀缺陷與步驟(3)中提取得到的外觀缺陷逐一進行缺陷匹配,對形狀匹配一致的外觀缺陷進行剔除,從而得到汽車漆面表面外觀缺陷。漆面缺陷檢測系統可實現不同車型油漆車身表面缺陷的自動化檢測。

在檢測時計算機系統需要處理大量圖像,因此需要更優的計算機處理器。在車身檢測過程中,則分為五部分展開,分別為車身前蓋、車頂、左邊、右邊和后蓋,其中各自安裝一臺計算機處理器,通過通訊主機實現交互通信,進而得出總體檢測結果。檢測系統的視覺傳感器則分別固定在車身的周邊位置,通過設置一定的掃描重疊區,保證檢測區域能夠完全覆蓋車輛表面。2自動檢測技術在汽車涂裝質量檢測中的應用流程車輛在達到檢測站之前,車身信息讀寫站會將目標車輛的相關數據進行統計并發送給檢測系統,主要信息包括車身的基本型號、車身表面的噴漆顏色、車頂的特殊形式、是否存在天線孔等。檢測系統在收到型號信息后,可以根據對應型號加載數據參數。當車輛行進觸發光電開關傳感器后,檢測系統正式開始工作,由編碼器發出的脈沖信號進行圖像采集工作,直到完成檢測任務。圖像采集圖像采集是自動檢測的首要個環節,每一個傳感器通過掃描車身的特定區域,采集800-1000張高清晰度圖像,根據車輛表面的面積大小,所采集的圖像個數有一定浮動空間,但其圖像會完整覆蓋車身表面,保證檢測目標不出現任何遺漏。在車身通過檢測系統時,視覺傳感器會一直根據編碼器生成的信號記錄對應圖像。可用于優化過程控制參數,降低缺陷發生率,從根本上實現工藝優化。九江工業質檢汽車面漆檢測設備生產廠家
可以在線和在生產周期內對ED涂層表面的所有質量相關缺陷進行檢測和分類。合肥高精度汽車面漆檢測設備價格
由此可以建立如下公式進行計算,由此即可形成更加直觀且定量的自動檢測系統缺陷檢出率和單車誤報的評價指標。缺陷檢出率=檢出缺陷/檢出缺陷+未檢出缺陷×100%;系統單車誤報=總誤報缺陷個數/總檢查車輛數量。為了進一步驗證自動檢測系統的檢測成效,還應建立相應的工作組,由規劃、質保和涂裝車間進行有效結合,一方面保證每日生產線上有效落實Audit查驗車身的方式,另一方面就要在每日生產的過程中,進行一定數量的自動檢測系統車身檢驗,并將自動檢測結果與Audit檢查結果進行對照,由此獲悉檢出缺陷、未檢測出缺陷和誤報缺陷等相關的數據。此外,針對不同車身顏色的情況,還可以建立檢出率和單車誤報的統計表。自動檢測系統在檢測過程中受到顏色的影響相對較小,其檢出率與單車誤報缺陷次數相對穩定,雖然存在個別波動情況,但總體而言并沒有出現較大差異,且很大程度上其差異原因在于系統設置的敏感性不同。在出現誤報缺陷的情況下,人工查看后確認無缺陷則可以不做返修處理工作。而自動檢測系統在批量生產運行過程中,還表現出額外的效果與優勢,比如減少了人工勞動力,降低了人力標準,提高了生產的自動化效果等。在傳統的報交線上,工人需要負責兩方面的工作。合肥高精度汽車面漆檢測設備價格
領先光學技術(江蘇)有限公司成立于2019年,公司總部地址位于武進區天安數碼城內獨棟12-2#寫字樓。我們的種子企業“ling先光學技術(常熟)有限公司”成立于2014年,是國家高新技術企業、科技型中小型企業、江蘇省民營科技企業、雛鷹企業。知識產權80余項(發明專利8項)。內核團隊:教授2名、博士2名、行業渠道關鍵人4人。長期穩定與復旦大學、大連理工大學合作。底層技術包括:光學(相位偏折、白光干涉、白光共焦、深度學習);MicroLED(發光器件、透明顯示、微型投影)。是做一件“利用光學進行工業質量檢測設備的生產和制造”。自主開發光學系統和底層內核算法,擁有十年以上行業經驗,主要應用于:汽車玻璃檢測行業、片材檢測行業、半導體材料檢測行業,我們的戰略新產品:微米級光刻機已經完成版流片,也正在一步步趨于穩定和成熟。公司在科技的浪潮中,已經具有將內核技術轉化為產品的經驗與能力。公司是高科技、高成長性企業,公司不斷的夯實自身技術基礎,愿成為中國工業發展中奠基石的一份子,打破國外的智能裝備的,樹名族自有高技術品牌。
- 溫州粗糙度檢測設備電話 2025-06-01
- 溫州油漆面檢測設備聯系方式 2025-05-31
- 馬鞍山微納檢測設備采購 2025-05-31
- 嘉興玻璃面檢測設備質量好價格憂的廠家 2025-05-31
- 湖州粗糙度檢測設備品牌 2025-05-31
- 上海平面度檢測設備推薦 2025-05-31
- 合肥玻璃面檢測設備推薦 2025-05-31
- 湖州硅片拋光面檢測設備聯系方式 2025-05-31
- 溫州玻璃面檢測設備質量好價格憂的廠家 2025-05-31
- 杭州玻璃面檢測設備生產廠家 2025-05-31
- 廣州本地傳感器價格多少 2025-06-01
- 樅陽銷售家用電器零配件保養 2025-06-01
- 防潮包膜一體機價格 2025-06-01
- 福建鉻鉬鋼法蘭市價 2025-06-01
- 鄭州琺瑯彩視覺定位uv打印機商城 2025-06-01
- 四川戶外吊艇架 2025-06-01
- 四川5000L搪玻璃反應釜生產廠家 2025-06-01
- 黃浦區滅火系統廚房設備公司 2025-06-01
- 小型點膠機器人執行標準 2025-06-01
- 永康不銹鋼卷法蘭 2025-06-01