泰順鎖螺絲電機服務商
伺服電機與步進電機的性能比較步進電機作為一種開環控制的系統,和現代數字控制技術有著本質的聯系。在國內的數字控制系統中,步進電機的應用廣。隨著全數字式交流伺服系統的出現,交流伺服電機也越來越多地應用于數字控制系統中。為了適應數字控制的發展趨勢,運動控制系統中大多采用步進電機或全數字式交流伺服電機作為執行電動機。雖然兩者在控制方式上相似(脈沖串和方向信號),但在使用性能和應用場合上存在著較大的差異。現就二者的使用性能作一比較。溫州坤格自動化科技有限公司致力于提供伺服電機,竭誠為您。泰順鎖螺絲電機服務商

伺服電機與步進電機過載能力不同步進電機一般不具有過載能力。交流伺服電機具有較強的過載能力。以三洋交流伺服系統為例,它具有速度過載和轉矩過載能力。其最大轉矩為額定轉矩的二到三倍,可用于克服慣性負載在啟動瞬間的慣性力矩。步進電機因為沒有這種過載能力,在選型時為了克服這種慣性力矩,往往需要選取較大轉矩的電機,而機器在正常工作期間又不需要那么大的轉矩,便出現了力矩浪費的現象。造成能源浪費,有較大負載慣量的工控,選擇伺服電機比步進電機更節約能源永磁同步電機代理商伺服電機,就選溫州坤格自動化科技有限公司,用戶的信賴之選,有需要可以聯系我司哦!
EtherCAT是一種用于工業自動化領域的實時以太網總線通信協議。它采用了主從結構,具有高效、實時和可靠的特點,廣泛應用于工業控制系統中。EtherCAT總線的工作原理是基于以太網技術的。以太網是一種常見的局域網通信協議,它使用CSMA/CD方式來實現多節點之間的通信。EtherCAT在以太網的基礎上進行了一些改進和優化,使其適用于實時控制領域。在EtherCAT總線中,一個節點被稱為從站(Slave),而主站(Master)負責控制和管理整個總線。主站通過發送廣播幀來控制從站的操作,而從站則通過響應幀來向主站反饋狀態信息。EtherCAT總線的一個特點是其高效的數據傳輸方式。在傳統的以太網中,數據需要經過多次的中繼和轉發才能到達目的地,這樣會增加傳輸延遲。而EtherCAT總線采用了“透明傳輸”技術,將數據從主站直接傳輸到目標從站,從而減少了傳輸延遲,提高了實時性。EtherCAT總線還采用了分布式時鐘同步技術,確保各個從站之間的時鐘同步,從而保證數據的準確性和一致性。主站會周期性地向從站發送同步幀,從而確保從站之間的時鐘同步,并根據同步幀的時間戳來進行數據采集和控制。
伺服電機是什么伺服電機(servomotor)是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服電機轉子轉速受輸入信號控制,并能快速反應,在自動控制系統中,用作執行元件,且具有機電時間常數小、線性度高等特性,可把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類,其主要特點是,當信號電壓為零時無自轉現象,轉速隨著轉矩的增加而勻速下降。伺服電機,就選溫州坤格自動化科技有限公司,用戶的信賴之選,有想法的不要錯過哦!
伺服電動機與單相異步電動機比較交流伺服電動機的工作原理與分相式單相異步電動機雖然相似,但前者的轉子電阻比后者大得多,所以伺服電動機與單機異步電動機相比,有三個特點:1、起動轉矩大由于轉子電阻大,與普通異步電動機的轉矩特性曲線相比,有明顯的區別。它可使臨界轉差率S0>1,這樣不僅使轉矩特性(機械特性)更接近于線性,而且具有較大的起動轉矩。因此,當定子一有控制電壓,轉子立即轉動,即具有起動快、靈敏度高的特點。2、運行范圍較廣3、無自轉現象正常運轉的伺服電動機,只要失去控制電壓,電機立即停止運轉。當伺服電動機失去控制電壓后,它處于單相運行狀態,由于轉子電阻大,定子中兩個相反方向旋轉的旋轉磁場與轉子作用所產生的兩個轉矩特性(T1-S1、T2-S2曲線)以及合成轉矩特性(T-S曲線)交流伺服電動機的輸出功率一般是0.1-100W。當電源頻率為50Hz,電壓有36V、110V、220、380V;當電源頻率為400Hz,電壓有20V、26V、36V、115V等多種。交流伺服電動機運行平穩、噪音小。但控制特性是非線性,并且由于轉子電阻大,損耗大,效率低,因此與同容量直流伺服電動機相比,體積大、重量重,所以只適用于0.5-100W的小功率控制系統。溫州坤格自動化科技有限公司為您提供伺服電機,有想法可以來我司咨詢!泰順鎖螺絲電機服務商
溫州坤格自動化科技有限公司為您提供伺服電機,有想法的可以來電咨詢!泰順鎖螺絲電機服務商
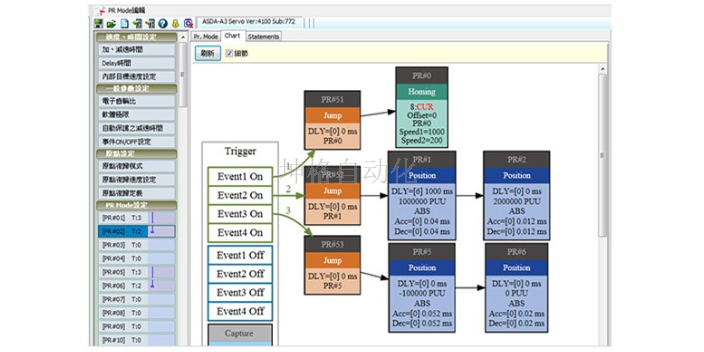
電子齒輪比主要功能:1.可以任意設置每單位脈沖對應電機速度和位移量(脈沖當量)2.當上位控制器脈沖發生頻率不足以達到目標速度時,可以設置電子齒輪比對指令脈沖乘以N倍頻。電子齒輪提供用戶簡單易用的分辨率設定。B3的分辨率為24-bit,也就是電機一圈會有16777216個脈沖。不論是搭配17-bit、20-bit或22-bit分辨率的編碼器,電子齒輪比都是依照B3分辨率24-bit做設定。當電子齒輪比等于1時,電機編碼器每一圈脈沖數為16777216pulse/rev;當電子齒輪比等于0.5,則命令端每二個脈沖對應到一個電機轉動脈沖。通常大的電子齒輪比會導致位置命令步階化,這時可通過S形命令平滑器或低通濾波器將其平滑化來改善。泰順鎖螺絲電機服務商
- 樂清飛剪電機哪里好 2025-05-26
- 蒼南鎖螺絲電機哪家好 2025-05-26
- 樂清飛剪電機 2025-05-26
- 臺州臺達電機廠商 2025-05-25
- 溫州電機哪種好 2025-05-25
- 永嘉臺達電機供應商 2025-05-25
- 鹿城區飛剪電機廠家 2025-05-25
- 衢州液壓伺服電機廠商 2025-05-25
- 洞頭區追剪電機供應 2025-05-25
- 金華臺達電機供應商 2025-05-25
- 常熟小型彎管規格尺寸 2025-06-04
- 淮安附近智能辦公 2025-06-04
- 大規模醫療設備有幾種 2025-06-04
- 合肥鋁鑄件浸滲價格 2025-06-04
- 惠山區哪些機械密封 2025-06-04
- 西藏平板直線電機的哪家好 2025-06-04
- 四川制造防孤島保護裝置注意事項 2025-06-04
- 江蘇多功能行星減速機多少錢 2025-06-04
- 龍華區加工變壓器出廠價 2025-06-04
- 安徽高溫合金擴散退火爐設備廠家 2025-06-04