山東金剛石砂輪全自動多功能玻璃切掰磨機重量
地域分布: 威海銀河光電設備股份有限公司位于山東省威海市,其客戶群體在地域上可能主要集中在以下幾個方面: 1、山東省內:作為山東省內的企業,威海銀河光電設備股份有限公司在山東省內的客戶群體可能相對較多。 2、全國范圍內:隨著公司業務的不斷拓展和影響力的提高,威海銀河光電設備股份有限公司的客戶群體已經逐漸擴展到全國范圍內。 3、國際市場:威海銀河光電設備股份有限公司的產品質量和性能得到了眾多認可,因此也吸引了一些國際客戶。 客戶類型: 威海銀河光電設備股份有限公司的客戶群體在類型上可能包括: 1、大型制造企業:這些企業通常對設備的質量和性能要求較高,且采購量較大。 2、中小型制造企業:這些企業可能對設備的性價比和售后服務更為關注。高效性:自動化程度高,極大提高了生產效率,降低了人工成本。山東金剛石砂輪全自動多功能玻璃切掰磨機重量
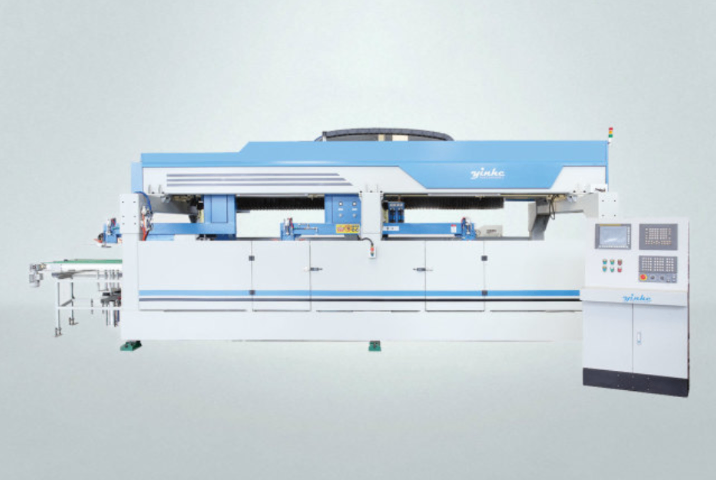
全自動多功能玻璃切掰磨機
威海銀河光電設備股份有限公司的重點技術主要體現在以下幾個方面: 一、玻璃加工領域的先進技術 1、全自動多功能玻璃加工機組: 威海銀河光電設備自主研發的全自動多功能玻璃加工機組具有速度快、產量高、成本低的特點。 該機組能夠實現對玻璃的高效、精確加工,滿足汽車玻璃、建筑玻璃等多個領域的需求。 通過不斷的技術升級和優化,該機組的技術已經達到國際同類產品水平,可替代同類進口設備。 2、玻璃預處理技術: 公司在玻璃預處理方面也具有先進的技術實力,能夠為客戶提供專業的玻璃預處理設備和解決方案。 這些設備和方案能夠確保玻璃在加工前的質量和性能,為后續的加工過程提供堅實的基礎。中國福耀玻璃全自動多功能玻璃切掰磨機尺寸玻璃加工厚度:通常在1.6-6.0mm之間,可根據實際需求進行調整。
威海銀河光電設備股份有限公司的技術優勢主要體現在以下幾個方面: 一、高效光電轉換技術 威海銀河光電設備采用了先進的光電轉換技術,能夠高效地將光能轉化為電能。這種高效轉換技術不僅提高了能源利用效率,降低了能源浪費,還符合當前節能減排的環保理念。在新能源領域,特別是太陽能發電系統中,這種高效光電轉換技術使得太陽能發電系統更加高效、可靠。 二、玻璃加工技術 1、自主研發的全自動多功能玻璃加工機組: 威海銀河光電設備在玻璃加工領域具有深厚的技術積累,其自主研發的全自動多功能玻璃加工機組具有速度快、產量高、成本低的特點。 該機組能夠實現對玻璃的高效、精確加工,滿足汽車玻璃、建筑玻璃等多個領域的需求。 通過不斷的技術升級和優化,該機組的技術已經達到國際同類產品先進水平,可替代同類進口設備,降低了客戶的采購成本。
全自動多功能玻璃加工機組由兩臺工業機器人(YHCG01-00汽車玻璃切磨機和YHHG01-00汽車玻璃鉆孔機)組成,整個機組采用數控系統控制各部分聯合動作,將玻璃完成上片、定位、切割、去邊、磨邊、鉆孔、出片等多功能的汽車玻璃加工全自動生產線。 本項目的實施,可實現全自動多功能玻璃加工機組國產化,各項指標可以與世界上先進的玻璃加工生產線相媲美,替代進口,為國內玻璃精加工企業提供先進技術,質量可靠、低成本、高效率的裝備,大幅度降低企業生產成本,改變汽車玻璃加工全自動生產線完全依靠進口局面,為國內全自動玻璃加工行業的發展開啟了新的篇章。在建筑行業中,該設備可用于加工各種建筑玻璃,如幕墻玻璃、隔斷玻璃、門窗玻璃等。
磨輪自動修復裝置,包括固定體、活動安裝在所述固定體上方的移動體、修整片座板以及轉動安裝在所述移動體上的一對主動鏈輪和從動鏈輪,在所述修整片座板上放置有砂輪修整片;還包括鏈輪回轉軸、鏈輪支軸、深溝球軸承、單向軸承以及用于撥動砂輪修整片移動的鏈條組件;還包括調節塊和調整支架,所述調節塊通過調整支架固定在所述修整片座板上,在所述調節塊的底面安裝有壓緊片,用于通過鏈條組件帶動砂輪修整片移動實現對砂輪的修整;本實用新型的磨輪自動修復裝置,利用移動式安裝的移動體和鏈條組件,能夠自動地帶動砂輪修整片移動實現對砂輪的修整,自動化取代人工方式,效率高,成本低,可準確、可靠地進行修整作業。該設備使用時,首先通過調節裝置控制切割刀片的角度,然后通過驅動電機驅動切割刀片實現切割工作。電子玻璃全自動多功能玻璃切掰磨機方案
公司自成立以來,憑借強大的技術實力和創新能力,在玻璃加工設備領域取得優異成就。山東金剛石砂輪全自動多功能玻璃切掰磨機重量
采用一致性控制解決新能源汽車特型玻璃加工過程質量管控問題。提出一種既能夠保證全局好,又同時可以具有指定收斂速度的分布式協同設計方法。通過使用逆設計方法,同時考慮無領頭者以及領導-跟隨多智能體系統一致性意義下的全局問題。提出一系列具有指定收斂速度的全局分布式協同方法。通過使用區域極點配置方法,滿足指定收斂速度的好控制增益可以通過求解線性矩陣不等式來給出。在此基礎之上,提出一種改進的LQR好方法。針對有向圖上的連續時間線性多智能體系統的一致性性能的調節問題進行研究。提出評估多智能體的一致性性能的兩個指標:收斂速度和阻尼度。前者用來刻畫多智能體系統達到協同一致的快慢,后者則被用來評估達到一致性過程中多智能體系統狀態的震蕩行為。針對智能體的一致性問題提出一種全新的控制協議設計方法。該協議可以通過調節自身的參數使得多智能體系統的狀態漸近地按照指定的收斂速度和阻尼度達到一致。解決有向網絡拓撲下連續時間線性多智能體系統的全局控制問題。領導-跟隨和無領導一致性問題都被考慮了。基于線性系統逆控制理論,給出控制協議的參數表達式。山東金剛石砂輪全自動多功能玻璃切掰磨機重量
- 中國自動掰邊全自動多功能玻璃單磨機方案 2025-05-31
- 山東信義玻璃全自動多功能玻璃單磨機參數 2025-05-31
- 山東電子玻璃全自動多功能玻璃單磨機 2025-05-31
- 中國全自動多功能玻璃單磨機重量 2025-05-31
- 中國無人化全自動多功能玻璃單磨機維護 2025-05-31
- 車窗全自動多功能玻璃單磨機保養 2025-05-31
- 山東車窗全自動多功能玻璃單磨機維護 2025-05-31
- 中國信義集團全自動多功能玻璃單磨機 2025-05-31
- 伺服電機全自動多功能玻璃單磨機重量 2025-05-31
- 中國建筑玻璃全自動多功能玻璃單磨機重量 2025-05-31
- 肇慶工業廠房空調廠家電話 2025-06-02
- 江蘇多功能智能家居怎么樣 2025-06-02
- 房地產備用電源哪家好 2025-06-02
- 高溫熱處理淬火 2025-06-02
- 北京履帶式絕緣斗臂車租賃 2025-06-02
- 國產寵物X光機處理方法 2025-06-02
- 南昌立式去毛刺機供應廠家 2025-06-02
- 佛山高質量自動包裝機 2025-06-02
- 長春伺服電動缸功能 2025-06-02
- 鹽城PI材質四氟接頭批發零售 2025-06-02