-
 廣東使用自動化控制系統
廣東使用自動化控制系統過程自動化:石油煉制和化工等工業中流體或粉體的化學處理自動化。一般采用由檢測儀表、調節器和計算機等組成的過程控制系統,對加熱爐、精餾塔等設備或整個工廠進行比較好控制。采用的主要控制方式有反饋控制、前饋控制和比較好控制等。圖4.自動化設備機械制造自動化:這是機械...
2025-05-20 -
 靜安區微型驅動器
靜安區微型驅動器電機額定功率與無錫文亞機電自動化設備有限公司驅動器的匹配程度關乎驅動系統的安全與性能。若電機額定功率大于驅動器的額定輸出功率,在電機滿載運行時,驅動器會處于過載狀態。這就如同小馬拉大車,驅動器內部的功率元件會承受過大的電流,容易引發過熱保護甚至燒毀。例如在大型...
2025-05-20 -
 松江區驅動器產品介紹
松江區驅動器產品介紹溫度對無錫文亞機電自動化設備有限公司驅動器的散熱系統是一個嚴峻考驗。隨著驅動器功率密度的不斷提高,其在運行過程中產生的熱量也越來越多。若散熱系統無法有效將熱量散發出去,驅動器內部溫度將持續升高,影響性能和可靠性。文亞機電的驅動器散熱系統主要包括散熱片、散熱風扇...
2025-05-20 -
 嘉定區購買自動化控制系統
嘉定區購買自動化控制系統自動化控制有半自動與全自動化,自動化控制是一種現代工業、農業、制造業等生產領域中機械電氣一體自動化集成控制技術和理論。自動化控制有半自動與全自動化自動化控制例如:機器、設備可以按照生產的要求和目的,進行自動化生產;全自動人只需要作為操作員,確定控制的要求和程序...
2025-05-19 -
 錫山區什么是工業機器人
錫山區什么是工業機器人中國的工業機器人我國工業機器人起步于70年代初期,經過20多年的發展,大致經歷了3個階段:70年代的萌芽期,80年代的開發期和90年代的適用化期。70年代是世界科技發展的一個里程碑:人類登上了月球,實現了金星、火星的軟著陸。我國也發射了人造衛星。世界上工業機器...
2025-05-19 -
 寶山區工業機器人有幾種
寶山區工業機器人有幾種驅動系統是向機械結構系統提供動力的裝置。根據動力源不同,驅動系統的傳動方式分為液壓式、氣壓式、電氣式和機械式4種。早期的工業機器人采用液壓驅動。由于液壓系統存在泄露、噪聲和低速不穩定等問題,并且功率單元笨重和昂貴,目前只有大型重載機器人、并聯加工機器人和一些特...
2025-05-19 -
 淮安工業機器人哪家好
淮安工業機器人哪家好人機協作隨著機器人從與人保持距離作業向與人自然交互并協同作業方面發展。拖動示教、人工教學技術的成熟,使得編程更簡單易用,降低了對操作人員的專業要求,熟練技工的工藝經驗更容易傳遞。 [5]2.自主化目前機器人從預編程、示教再現控制、直接控制、遙操作等**縱作業模...
2025-05-19 -
 傳感器機械結構
傳感器機械結構24GHz雷達傳感器采用高頻微波來測量物體運動速度、距離、運動方向、方位角度信息,采用平面微帶天線設計,具有體積小、質量輕、靈敏度高、穩定強等特點,***運用于智能交通、工業控制、安防、體育運動、智能家居等行業。工業和信息化部2012年11月19日正式發布了《...
2025-05-19 -
 定做傳感器機械結構
定做傳感器機械結構無線溫度傳感器將控制對象的溫度參數變成電信號,并對接收終端發送無線信號,對系統實行檢測、調節和控制。可直接安裝在一般工業熱電阻、熱電偶的接線盒內,與現場傳感元件構成一體化結構。通常和無線中繼、接收終端、通信串口、電子計算機等配套使用,這樣不僅節省了補償導線和電...
2025-05-19 -
 山西本地傳感器
山西本地傳感器傳感器的靈敏度是有方向性的。當被測量是單向量,而且對其方向性要求較高,則應選擇其它方向靈敏度小的傳感器;如果被測量是多維向量,則要求傳感器的交叉靈敏度越小越好。頻率響應特性傳感器的頻率響應特性決定了被測量的頻率范圍,必須在允許頻率范圍內保持不失真。實際上傳感器...
2025-05-19 -
 遼寧傳感器有幾種
遼寧傳感器有幾種傳感器的靜態特性是指對靜態的輸入信號,傳感器的輸出量與輸入量之間所具有相互關系。因為這時輸入量和輸出量都和時間無關,所以它們之間的關系,即傳感器的靜態特性可用一個不含時間變量的代數方程,或以輸入量作橫坐標,把與其對應的輸出量作縱坐標而畫出的特性曲線來描述。表征...
2025-05-18 -
寧夏工業機器人互惠互利
在工業生產領域中,工業機器人的安裝至為重要,若是安裝出現問題,不僅會影響機器人設備的使用性能,同時還會導致工業機器人使用壽命降低,并會對工業生產安全造成影響,對企業的經濟效益造成損傷,因此做好工業機器人的安裝工作十分重要,結合以往的工作經驗,筆者認為在工業機器...
2025-05-18 -
 自動化自動化控制系統客服電話
自動化自動化控制系統客服電話隨著生產和科學技術的發展,自動控制系統變得越來越復雜。人們不但希望能對其進行良好控制,而且希望能進行實時監測,及時處理故障。這就提出了自動控制系統的故障檢測與診斷問題,促進了故障檢測診斷的理論研究和應用開發所謂“故障”是指系統所處的一種非正常工作狀態,此時系統...
2025-05-18 -
 淮安小型工業機器人
淮安小型工業機器人工廠采用工業機器人生產,是可以解決很多安全生產方面的問題。對于由于個人原因,如不熟悉工作流程、工作疏忽、疲勞工作等導致安全生產隱患,統統都可以避免了。 [4]4.易于管理,經濟效益***企業可以很清晰的知道自己每天的生產量,根據自己所能夠達到的產能去接收訂單和...
2025-05-18 -
 虹口區驅動器常見問題
虹口區驅動器常見問題無錫文亞機電自動化設備有限公司的驅動器在不同工業環境中面臨著多樣的電壓波動情況,電壓波動范圍對其適用性是一個嚴峻考驗。不同地區的電網質量存在差異,一些偏遠地區或工業用電密集區域,電壓波動可能較為頻繁且幅度較大。文亞機電驅動器雖然具備一定的電壓適應能力,但當電壓...
2025-05-18 -
寧夏附近哪里有驅動器
高濕度且高溫的環境對無錫文亞機電自動化設備有限公司的驅動器來說是雙重考驗。在這種環境下,驅動器內部電子元件不僅要承受高溫帶來的性能劣化,還要應對高濕度引發的絕緣問題。例如在一些熱帶地區的工業廠房,環境溫度可達 35℃以上,濕度超過 85%。文亞機電針對這種惡劣...
2025-05-18 -
 河北大型傳感器
河北大型傳感器中國傳感器產業正處于由傳統型向新型傳感器發展的關鍵階段,它體現了新型傳感器向微型化、多功能化、數字化、智能化、系統化和網絡化發展的總趨勢。傳感器技術歷經了多年的發展,其技術的發展大體可分三代:***代是結構型傳感器,它利用結構參量變化來感受和轉化信號。第二代是...
2025-05-18 -
甘肅哪里有工業機器人
1954年美國戴沃爾**早提出了工業機器人的概念,并申請了專利。該**的要點是借助伺服技術控制機器人的關節,利用人手對機器人進行動作示教,機器人能實現動作的記錄和再現。這就是所謂的示教再現機器人。現有的機器人差不多都采用這種控制方式。1959年UNIMATIO...
2025-05-18 -
錫山區定做自動化控制系統
DCS用于工業應用,例如石油和天然氣提煉廠、供暖通風和空調、食品加工廠、污水處理廠等。與SCADA系統一樣,分布式控制系統同時具有軟件和硬件組件。工業傳感器是檢測物理刺激(如光、熱、運動、機械壓力)的設備,然后做出相應的響應(例如,通過在屏幕上顯示值、啟動開關...
2025-05-18 -
遼寧自動化控制系統客服電話
隨著生產規模的日益擴大。一旦發生事故,不但在經濟上會造成巨大的損失,而且人員傷亡和對環境的影響均非同小可,因此生產的安全問題日益受重視。目前,一些化工或石化企業的安全系統,這樣企業的控制系統就由兩大部分組成,即DCS與專門的PLC。由于新型DCS的功能不斷擴大...
2025-05-18 -
閔行區大型傳感器
通常情況下,傳感器的實際靜態特性輸出是條曲線而非直線。在實際工作中,為使儀表具有均勻刻度的讀數,常用一條擬合直線近似地**實際的特性曲線、線性度(非線性誤差)就是這個近似程度的一個性能指標。擬合直線的選取有多種方法。如將零輸入和滿量程輸出點相連的理論直線作為擬...
2025-05-18 -
崇明區使用工業機器人
20世紀50年代末,工業機器人**早開始投入使用。約瑟夫·恩格爾貝格(Joseph F.Englberger)利用伺服系統的相關靈感,與喬治·德沃爾(GeorgeDevol)共同開發了一臺工業機器人——“尤尼梅特”(Unimate),率先于1961年在...
2025-05-18 -
重慶傳感器應用范圍
傳感器早已滲透到諸如工業生產、宇宙開發、海洋探測、環境保護、資源調查、醫學診斷、生物工程、甚至文物保護等等極其之泛的領域。可以毫不夸張地說,從茫茫的太空,到浩瀚的海洋,以至各種復雜的工程系統,幾乎每一個現代化項目,都離不開各種各樣的傳感器。由此可見,傳感器技術...
2025-05-18 -
虹口區傳感器圖片
遲滯:傳感器在輸入量由小到大(正行程)及輸入量由大到小(反行程)變化期間其輸入輸出特性曲線不重合的現象成為遲滯。對于同一大小的輸入信號,傳感器的正反行程輸出信號大小不相等,這個差值稱為遲滯差值。4.重復性:重復性是指傳感器在輸入量按同一方向作全量程連續多次變化...
2025-05-18 -
江陰工業機器人圖片
機器人機械本體由于加工誤差和裝配誤差的原因,難以避免會和理論數學模型存在偏差,會降低機器人TCP精度和軌跡精度,如在焊接和離線編程使用時會受到嚴重影響。通過檢測和算法標定補償機器人的模型參數,可以較好地解決此問題。(4)工藝包完善控制系統要與實際工程應用相結合...
2025-05-18 -
 自動化工業機器人有幾種
自動化工業機器人有幾種工業機器人是***用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能。工業機器人被廣泛應用于電子、物流、化工等各個工業領域之中。20世紀50年代末,工業機器人**早開始投入使用。約瑟夫·恩格...
2025-05-18 -
節能自動化控制系統圖片
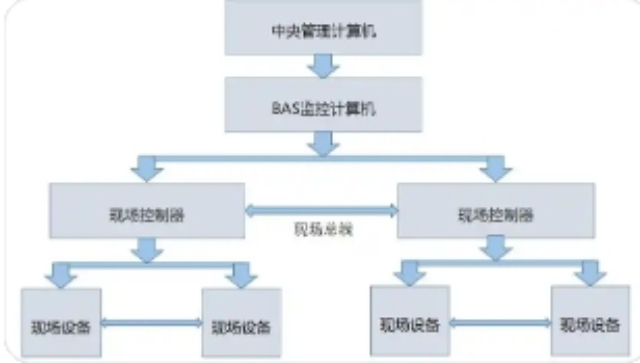
現場總線本來是一種非常有前途的技術,理應得到迅速的發展和推廣,但由于國際標準的過多,影響了推廣,例如***代總線型的現場總線的國際標準已達到10多種,加上第二代的實時工業以太網,其國際標準可能會有20多種,而第三代的總線通信方案又在興起,而且各大跨國公司和有關...
2025-05-18 -
 自動化驅動器應用范圍
自動化驅動器應用范圍電機慣量是電機的一個重要參數,其與無錫文亞機電自動化設備有限公司驅動器的匹配情況至關重要。若電機慣量與驅動器匹配不當,會給驅動系統帶來諸多問題。當電機慣量過大,而驅動器的能力不足以快速響應電機的加減速需求時,就像一輛重型卡車配備了一個小功率發動機,啟動和剎車都...
2025-05-17 -
工業機器人圖片
現代該改良版的工業機器人可按照人工智能的方式,根據指定的原則**自動化操作,如可根據接收到的信號,完成信號指令規定的運行軌跡,從而快速適應新的環境。而工業機器人系統并不是單獨使用的,在工業機器人投入生產的過程中,必須要與其他**設備聯系在一起,而這些**設備上...
2025-05-17 -
江陰節能傳感器
按測量目物理型傳感器是利用被測量物質的某些物理性質發生明顯變化的特性制成的。化學型傳感器是利用能把化學物質的成分、濃度等化學量轉化成電學量的敏感元件制成的。生物型傳感器是利用各種生物或生物物質的特性做成的,用以檢測與識別生物體內化學成分的傳感器。按其構成基本型...
2025-05-17