-
 主動安全預警-叉車專YONG反水智能預警系統|叉車專YONG防水智能預警系統|叉車專YONG防水智能一體機
主動安全預警-叉車專YONG反水智能預警系統|叉車專YONG防水智能預警系統|叉車專YONG防水智能一體機集車載視頻監控、行車記錄儀、DSM駕駛員狀態分析系統(Driver Status Monitoring,也被稱為司機狀態監控系統)、BSD盲區監控于一體的叉車專YONG防水智能系統,其技術原理融合了多項先進技術,以下是詳細分析: 一、車載視頻監控車載...
2024-11-15 -
 主動安全預警系統BSD盲區監測預警|360全景影像系統BSD盲區監測預警|BSD盲區監測預警系統
主動安全預警系統BSD盲區監測預警|360全景影像系統BSD盲區監測預警|BSD盲區監測預警系統BSD盲區監測預警系統是一種專為駕駛安全而設計的汽車智能系統,其主要功能及特點可以歸納如下: 一、定義BSD,即Blind Spot Detection,意為盲點監測。BSD盲區監測預警系統通過安裝在車輛上的傳感器(如攝像頭、毫米波雷達等)實時監測車...
2024-11-14 -
 主動安全預警系統云端后臺管理|主動安全預警系統云平臺管理|車輛主動安全預警系統的云臺管理
主動安全預警系統云端后臺管理|主動安全預警系統云平臺管理|車輛主動安全預警系統的云臺管理云端后臺管理在保證數據安全性方面扮演著至關重要的角色。以下是一些關鍵措施,用于確保云端后臺管理中數據的安全性: 一、數據加密傳輸加密:采用先進的加密算法,如AES(高級加密標準)和TLS(傳輸層安全協議),確保數據在傳輸過程中得到保護,防止數據在傳輸...
2024-11-14 -
 8路4G帶網口輸出360全景影像系統|360全景影像系統主機的接口擴展配置|8路4G帶網口輸出360全景影像系統擴展接口配置
8路4G帶網口輸出360全景影像系統|360全景影像系統主機的接口擴展配置|8路4G帶網口輸出360全景影像系統擴展接口配置針對8路4G帶網口ONVIF視頻輸出360全景影像主機,其豐富的接口配置通常包括但不限于以下幾種: 1,視頻接口:視頻輸入:支持8路視頻輸入,用于連接攝像頭等視頻采集設備,實現360度全景影像的采集。視頻輸出:可能包括HDMI和VGA等接口,用于將處...
2024-11-13 -
 山東乘用車多路視頻拼接系統開發商
山東乘用車多路視頻拼接系統開發商多路視頻拼接360全景影像系統的優點介紹如下:優點:全景監控:通過多個攝像頭的組合和拼接技術,實現360度無死角監控,提供***的視角,確保監控區域無盲區。實時性:系統能夠實時傳輸和顯示拼接后的全景圖像,使監控人員能夠及時了解監控區域的實時情況。高清...
2024-11-12 -
 叉車360全車可視系統廠家
叉車360全車可視系統廠家工程車360全景影像系統在行駛過程中的主要作用包括:提供全景視野:該系統通過多個攝像頭捕捉周圍環境的圖像,將其合成為全景圖像或視頻,給予駕駛員一個更、更清晰的視野。這有助于發現潛在的障礙物、行人或其他車輛,減少盲區,提高行駛安全性。輔助駕駛決策:通...
2024-11-11 -
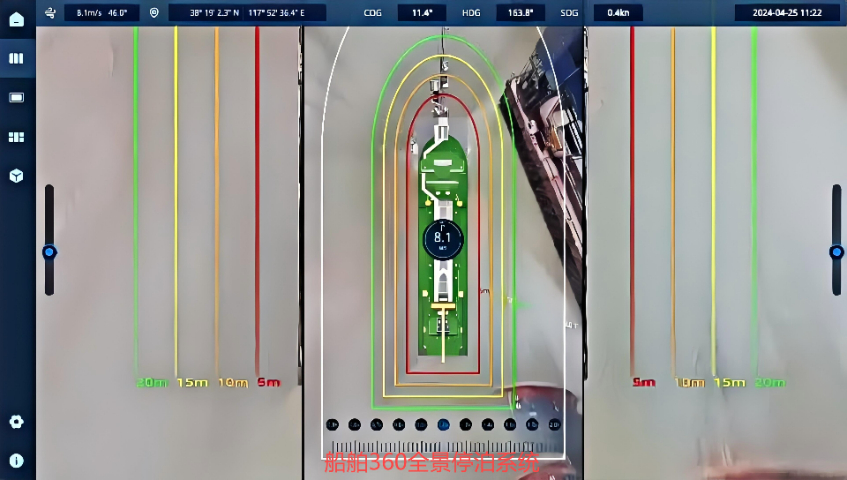
 廣西船舶主動安全預警系統開發商
廣西船舶主動安全預警系統開發商(專輯二)輪船拼接360全景影像的技術難度主要體現在以下幾個方面: 動態物體處理:如果在拍攝過程中輪船上有移動的物體(如人員、海浪等),這些動態物體可能會在不同圖像之間出現不匹配的情況。為了保持全景影像的連續性和準確性,需要采用適當的算法來處理這些...
2024-11-11 -
 吊車6路360全景生產廠家
吊車6路360全景生產廠家安裝工程車360度全景攝像頭與主機需要注意事項,攝像頭安裝:根據車型選擇合適的位置和方式安裝四個攝像頭。一般來說,前視攝像頭可以安裝在車前中網或車標處;后視攝像頭可以安裝在車后牌照燈或后備箱扣手處;左右視攝像頭可以安裝在后視鏡底部或側裙處。安裝時要注意避開發動...
2024-11-10 -
 中國香港云臺主動安全預警系統推薦廠家
中國香港云臺主動安全預警系統推薦廠家(專輯三)ONVIF協議與RTSP視頻流在360全景影像中的應用原理密切相關,它們共同為車載360全景影像系統提供了高效、標準化的視頻傳輸與控制方案。以下是詳細的應用原理: 三、ONVIF與RTSP的結合應用視頻流傳輸流程:在車載360全景影像系統中...
2024-11-09 -
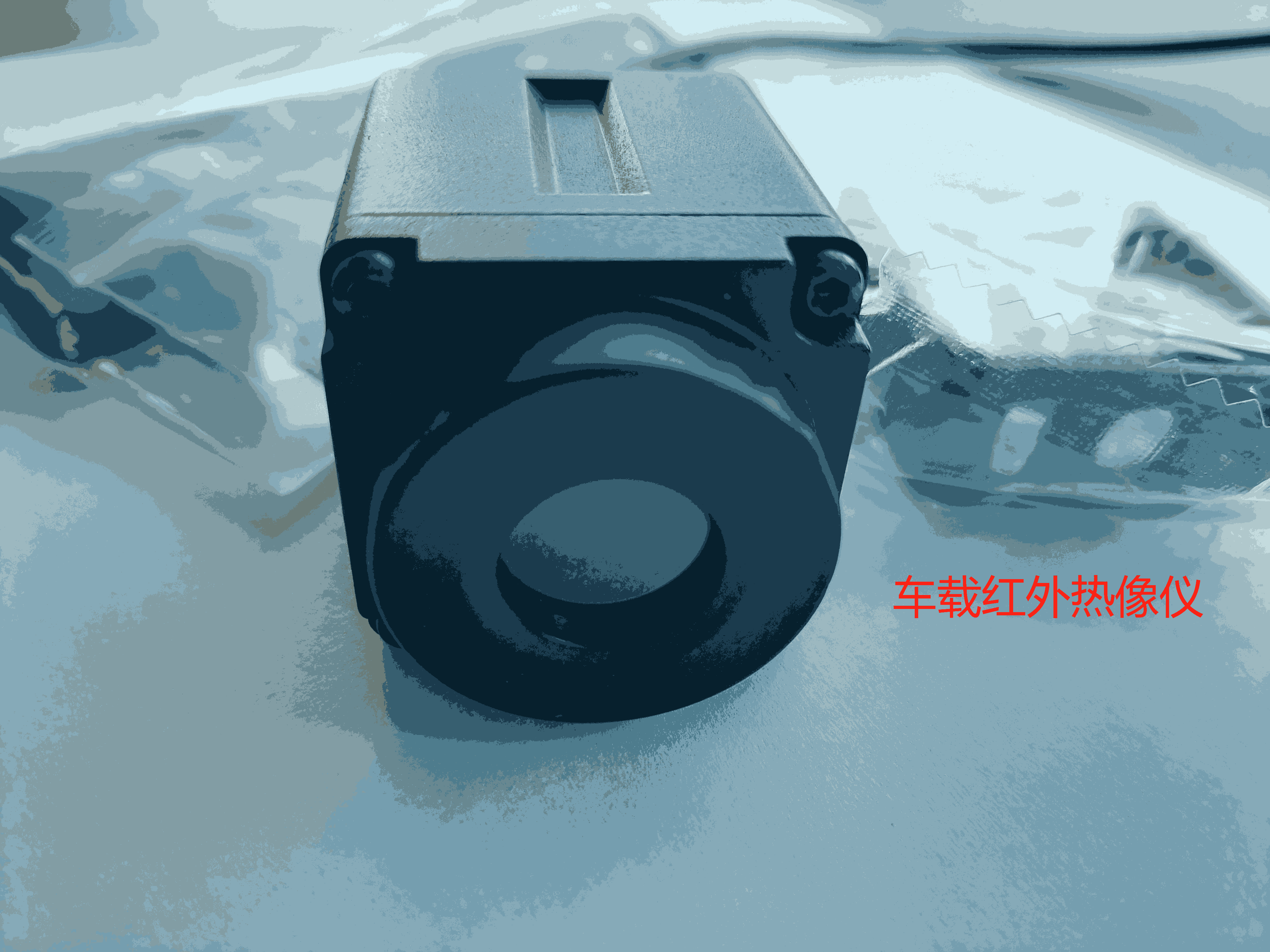 車載紅外熱像儀|車載熱成像攝像頭|AI360全景影像系統-集成紅外熱像儀
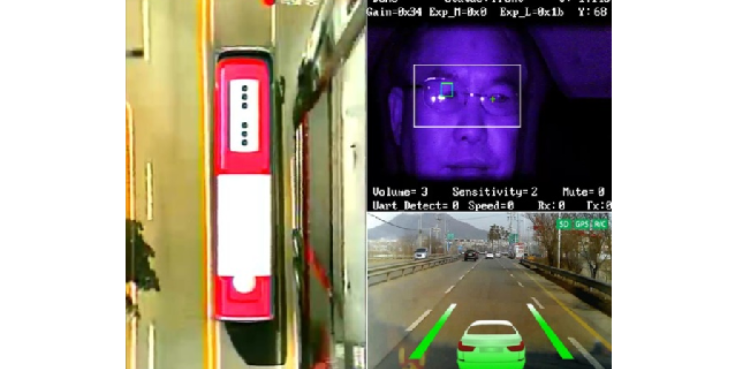
車載紅外熱像儀|車載熱成像攝像頭|AI360全景影像系統-集成紅外熱像儀車載紅外熱像儀在AI360全景影像系統中的應用,為現代汽車的駕駛安全和智能化提供了強有力的支持。以下是對這一應用的詳細分析: 一、車載紅外熱像儀的基本原理車載紅外熱像儀利用物體輻射的紅外線進行成像。在自然界中,凡是溫度大于絕DUI零度(-273℃)的...
2024-11-08 -
 江蘇起重機主動安全預警系統定制開發
江蘇起重機主動安全預警系統定制開發帶云臺監控管理主動安全一體機在實際應用中解決了多個實際問題,主要體現在以下幾個方面: 一、提升駕駛安全性盲區預警:360°全景影像系統和BSD盲區預警功能,結合AI技術對車輛周圍進行實時檢測,識別并跟蹤潛在的危險物體,如行人、其他車輛等。在預測到潛在...
2024-11-08 -
 紅外熱像儀|熱成像攝像頭|車載熱成像攝像頭
紅外熱像儀|熱成像攝像頭|車載熱成像攝像頭紅外熱像儀在車載主動安全預警系統中的應用,主要得益于其能夠探測并可視化目標物體的紅外輻射,這一特性使得紅外熱像儀在多種駕駛環境中都能發揮重要作用。以下是對其應用的詳細分析: 一、紅外熱像儀的工作原理紅外熱像儀利用紅外輻射照像原理,研究物體表面的溫度分...
2024-11-07 -
 MDVR高清車載錄像機系統|MDVR高清車載錄像機|MDVR高清車載錄像機集成
MDVR高清車載錄像機系統|MDVR高清車載錄像機|MDVR高清車載錄像機集成MDVR(Mobile Digital Video Recorders),即車載數字視頻錄像機,是一種集成了先進視音頻編解碼技術的車用電子設備。它可以實現車內外視頻的數模轉換、壓縮存儲,并具備GPS定位、車載娛樂播放、無線網傳等附加功能。為了進一步提升MD...
2024-11-07 -
 四川客車疲勞駕駛預警系統公司
四川客車疲勞駕駛預警系統公司司機監控預警系統和疲勞駕駛預警系統都是為了提高駕駛安全性而設計的系統,它們之間具有一些關聯和區別,如下所述:關聯:目標:司機監控預警系統和疲勞駕駛預警系統的共同目標是提醒駕駛員注意駕駛行為和狀態,避免駕駛員因疲勞、分心或其他原因而導致的交通事故發生。監...
2024-11-06 -
 疲勞駕駛預警集成MDVR應用|MDVR高清車載錄像機集成應用|MDVR高清車載錄像機集成
疲勞駕駛預警集成MDVR應用|MDVR高清車載錄像機集成應用|MDVR高清車載錄像機集成MDVR(Mobile Digital Video Recorders,車載數字視頻錄像機)高清車載錄像機與疲勞駕駛預警設備的集成應用,是一個結合了音視頻監控、數據分析與預警提示的綜合性系統。以下是如何實現這種集成應用的具體步驟和優勢: 一、集成方案...
2024-11-06 -

-
 MDVR硬盤錄像機|高清車載硬盤錄像機|高清車載硬盤錄像機
MDVR硬盤錄像機|高清車載硬盤錄像機|高清車載硬盤錄像機MDVR高清車載硬盤錄像機的功能特點: 內置海思高性能圖像處理芯片,H.264編碼,高壓縮比,圖像清晰 AHD/TVI/CVI/IPC/模擬五合一視頻輸入,兼容性強, 支持8+1實時預覽及存儲 1路視音頻同步輸出,1路VGA輸出 ...
2024-11-06 -
 鏟車360全景環視設備雷達預警
鏟車360全景環視設備雷達預警車侶工程車360全景影像系統是一種重要的安全輔助設備,在工程車行駛、作業過程中發揮著重要作用。為了滿足實際應用的需求,工程車360全景影像系統需要具備以下品質要求:圖像質量:系統采集的影像質量應該清晰、穩定,沒有明顯的波紋、噪點、鋸齒、閃爍等現象,...
2024-11-05 -
 履帶吊多路360拼接算法品牌
履帶吊多路360拼接算法品牌工程車360度全景影像系統對于車外行人確實有實際價值,行人安全保護:全景影像系統可以捕捉到工程車周圍的行人圖像,并提供給駕駛員一個更的視野。這有助于駕駛員更早地察覺到潛在的行人,預測他們的行動,并采取相應的駕駛動作,從而減少行人與工程車之間的潛在碰...
2024-11-05 -
 升降機360全景影像預警
升降機360全景影像預警車侶工程車360全景影像系統可以通過以下方式實現精確定位和作業,以提高準確性和效益:集成GPS和北斗定位系統:將360全景影像系統與GPS和北斗定位系統相連,可以獲取高精度的定位信息。通過這些定位信息,可以準確地確定車輛的位置和姿態,從而進行更精確...
2024-11-05 -
 礦車360全景影像設備預警
礦車360全景影像設備預警工程車360度全景影像系統對其他行駛車輛同樣有實際使用價值。事故預防與安全駕駛:全景影像系統可以提供工程車周圍的全景視野,幫助駕駛員更好地觀察其他行駛車輛的位置、行駛狀態和意圖。這有助于減少駕駛員的盲區,提高對其他車輛的感知能力,從而預防潛在的碰撞事故。駕駛輔...
2024-11-05 -
6路360全景雷達預警
車侶工程車360全景影像系統在道路施工中有很多應用效果。它可以提供四周的視角,幫助操作員更好地了解施工現場的情況,提高施工效率和安全性。首先,該系統可以實時監控和記錄施工過程中的環境變化。操作員可以通過觀察全景影像,了解道路建設現場的實際情況,包括...
2024-11-04 -
 裝載機360全景影像生產廠家
裝載機360全景影像生產廠家安裝工程車360度全景攝像頭與主機需要注意事項,攝像頭安裝:根據車型選擇合適的位置和方式安裝四個攝像頭。一般來說,前視攝像頭可以安裝在車前中網或車標處;后視攝像頭可以安裝在車后牌照燈或后備箱扣手處;左右視攝像頭可以安裝在后視鏡底部或側裙處。安裝時要注意避開發動...
2024-11-04 -
吊車360全景環視系統廠家
工程車360全景影像的拼接技術主要依靠圖像拼接算法來實現。拼接技術的原理一般包括以下關鍵步驟:.圖像采集:360全景影像系統會搭載多個廣角攝像頭或魚眼鏡頭,安裝在車輛的不同位置,用于采集周圍環境的圖像。.圖像校正:由于魚眼鏡頭的畸變效果,需要對采集...
2024-11-04 -
 公交車360全景影像系統品牌
公交車360全景影像系統品牌360全景影像系統。通過在汽車周圍安裝能覆蓋車輛周邊所有視場范圍的 4 個廣角攝像頭,對同一時刻采集到的多路視頻影像處理成一幅車輛周邊360度的全景俯視圖,然后在中控臺的屏幕上顯示,也可以顯示任何一方的單視圖,可徹底消滅車輛周圍的視覺盲點,讓駕駛員清楚查看車輛...
2024-11-04 -
 鏟車360度全景攝像頭開發商
鏟車360度全景攝像頭開發商車侶工程車360全景影像系統接入4G通信的意義在于,通過4G網絡將車輛的信息實時上傳到云端,實現遠程監控和管理。這種方式具有以下優勢:實時監控:通過4G網絡,可以實時監控車輛的位置、速度、行駛路線等信息,適用于物流、出租車、公交等領域。數據共享:車...
2024-11-03 -
 吊車360全車可視系統采購
吊車360全車可視系統采購工程車360全景影像系統安裝步驟:確定安裝位置:根據車輛類型和使用需求,選擇合適的位置進行安裝,常見的選擇包括車輛正前方、車頂等位置。安裝攝像頭:根據選擇的位置,安裝360全景影像系統所需的攝像頭,確保攝像頭能夠獲取的視野。安裝顯像設備:根據實際需求,安裝顯...
2024-11-03 -
 陜西疲勞駕駛預警系統品牌
陜西疲勞駕駛預警系統品牌疲勞駕駛系統可以提高道路交通的安全性,主要通過以下幾個方面:疲勞檢測和預警:疲勞駕駛系統可以通過傳感器和算法分析駕駛員的行為和生理特征,如眼睛狀態、頭部姿勢、方向盤操作等。當系統檢測到駕駛員出現疲勞跡象時,及時發出警報提醒駕駛員休息或采取措施。這可...
2024-11-03 -
 升降機360環影系統開發商
升降機360環影系統開發商工程車司機在使用360度全景影像系統時需要注意以下事項:在使用全景影像系統之前,確保系統已經正確安裝和校準,以確保影像的準確性和清晰度。在行駛過程中,不要過度依賴全景影像系統,仍然需要保持對周圍環境的觀察和注意力集中在道路上。全景影像系統可以提供更...
2024-11-03 -
 江蘇疲勞駕駛預警系統的前景
江蘇疲勞駕駛預警系統的前景車侶DSMS疲勞駕駛預警系統在乘用車領域的應用效果主要體現在以下幾個方面:保障駕駛安全:疲勞駕駛預警系統能夠實時監測駕駛員的狀態,包括眼睛運動、眨眼頻率、打哈欠等指標,一旦發現駕駛員出現疲勞跡象,例如頻繁打哈欠或閉眼時間較長,將發出警報提醒駕駛員及...
2024-11-02