素材六:機器人力控提升多任務(wù)處理能力機器人力控技術(shù)能夠讓機器人在執(zhí)行多個復(fù)雜任務(wù)時保持高效和精確。傳統(tǒng)工業(yè)機器人通常只針對單一任務(wù)進行優(yōu)化,而機器人力控通過動態(tài)調(diào)整機器人的施力和動作,使其能夠在不同任務(wù)之間靈活轉(zhuǎn)換,無論是精細(xì)裝配、力道控制還是碰撞避讓,機器人都能夠根據(jù)具體需求自動調(diào)整。這種多任務(wù)處理能力極大提升了生產(chǎn)線的柔性和適應(yīng)性。達寬科技的機器人力控系統(tǒng),不僅能夠應(yīng)對不同類型的工作任務(wù),還能夠優(yōu)化工作流程,提高生產(chǎn)線的整體效率和多樣性,滿足客戶對生產(chǎn)靈活性和快速響應(yīng)的需求。機器人力控幫助企業(yè)減少了操作中的不穩(wěn)定因素,達寬科技為客戶提供了更可靠的生產(chǎn)方式。上海協(xié)作機器人力控調(diào)試
隨著PCBA生產(chǎn)線的規(guī)模不斷擴大和裝配工藝性能的提升,PCBA線束的裝配質(zhì)量和效率變得越來越重要。PCBA線束裝配已經(jīng)成為提升電子制造生產(chǎn)效率和產(chǎn)品質(zhì)量的關(guān)鍵,其精確度和可靠性直接影響電子產(chǎn)品的性能。在傳統(tǒng)人工裝配過程中,PCBA線束組裝既耗時又費力,且易受人為因素影響,從而影響裝配質(zhì)量和效率的穩(wěn)定性。隨著工業(yè)自動化技術(shù)的進步,機器人在線束裝配領(lǐng)域的應(yīng)用日漸增多。然而,機器人在精確控制力度和位置方面仍存在不足。為了確保每個連接點都達到高標(biāo)準(zhǔn)的質(zhì)量要求,力控技術(shù)的引入顯得尤為重要。力控技術(shù)讓機器人能夠在高精度、高速度的條件下,完成復(fù)雜的線束裝配任務(wù),減少人為干預(yù),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。達寬科技的機器人力控系統(tǒng)已成功落地多家頭部汽車電子、工控機、服務(wù)器廠家,助力其精密裝配過程的自動化、智能化、數(shù)字化改造。山西機器人力控優(yōu)勢達寬科技的機器人力控技術(shù)優(yōu)化了生產(chǎn)過程,確保了產(chǎn)品在每個環(huán)節(jié)中的一致性,提升了質(zhì)量控制。

隨著工業(yè)自動化和智能制造的快速發(fā)展,機器人力控技術(shù)已成為現(xiàn)代工業(yè)生產(chǎn)中不可或缺的一部分。機器人負(fù)載辨識技術(shù),作為機器人力控的關(guān)鍵環(huán)節(jié),對于提高機器人力控的操作精度和效率具有重要意義。本文將講解如何使用達寬機器人力控系統(tǒng)的負(fù)載辨識功能。負(fù)載辨識功能,是指末端的負(fù)載在不同重量、不同形狀、不同材質(zhì)的情況下,精計算并識別末端負(fù)載的重量和重心等參數(shù)。達寬科技設(shè)計的這一功能讓機器人在自動化流程中對負(fù)載的精確控制和調(diào)整。
汽車線束裝配是電氣系統(tǒng)和機械系統(tǒng)連接的關(guān)鍵環(huán)節(jié),其精確度和可靠性直接影響終產(chǎn)品的性能。隨著工業(yè)自動化技術(shù)的進步,機器人在線束裝配領(lǐng)域的應(yīng)用日漸增多。但是,對于自動化廠商,傳統(tǒng)機器人裝配在精確控制力度和位置方面仍存在不足,進而影響品控。車輛線束系統(tǒng)中的線束長度可達數(shù)公里。因此,在工業(yè)4.0的浪潮、企業(yè)追求降本增效的大環(huán)境中,眾多汽車生產(chǎn)廠商,都在追求汽車線束更高效率、穩(wěn)定性更好、良品率更高的組裝方式。那怎么讓線束裝配在保證效率的前提下,提高裝配質(zhì)量和良品率呢?現(xiàn)代工業(yè)機器人裝備了高精度的伺服電機和精密的傳動系統(tǒng),能夠?qū)崿F(xiàn)亞毫米級別的運動精度。然而,機器人在精確控制力度和位置方面仍存在不足。且線束的接口比較脆弱,容易損壞。且裝配過程中可能出現(xiàn)的微小偏差和不規(guī)則性,例如線材的彎曲或配件的尺寸差異。為了應(yīng)對這些問題,達寬科技在多家汽車廠家的項目中,采取了機器人力控方案。機器人力控讓機器人的每一次操作都更加精確,達寬科技的技術(shù)可以確保生產(chǎn)過程中不出現(xiàn)不必要的偏差。
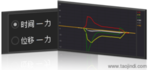
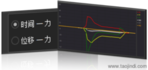
本文我們將以KUKA工業(yè)機器人為例,介紹如何基于達寬平臺級機器人力控大腦裝配汽車ECU控制器插頭35p線束。首先,使用工具坐標(biāo)系精確示教線束接口的初始位置。35針腳連接器因其眾多的針腳和較大的接觸面積,在傳統(tǒng)裝配過程中會產(chǎn)生較大的干擾外力。這不僅要求機器人具有極高的裝配精度,而且裝配過程中的干擾外力也可能造成影響。例如,在裝配過程中,如果因來料誤差等原因,機器人施加過大的力量,有損壞連接器的風(fēng)險。如何在不損壞連接器的前提下,精確地將線束連接到指定位置?在測試過程中,我們發(fā)現(xiàn)依賴位置判斷可能導(dǎo)致在工裝偏移或誤差時損壞連接器。而依賴力判斷可能因干擾外力誤判而認(rèn)為已到達指定位置,但這種方法能確保連接器不受損害,提升安全性。因此,結(jié)合位置和力的雙重判斷是更為穩(wěn)妥的解決方案。通過機器人力控技術(shù),達寬科技幫助企業(yè)提升生產(chǎn)線的自動化水平,減少了人為操作風(fēng)險,增強了生產(chǎn)的安全性。協(xié)作機器人力控測試
機器人力控技術(shù)提升了生產(chǎn)效率,達寬科技為企業(yè)提供了更加安全可靠的自動化解決方案。上海協(xié)作機器人力控調(diào)試
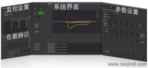
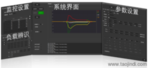
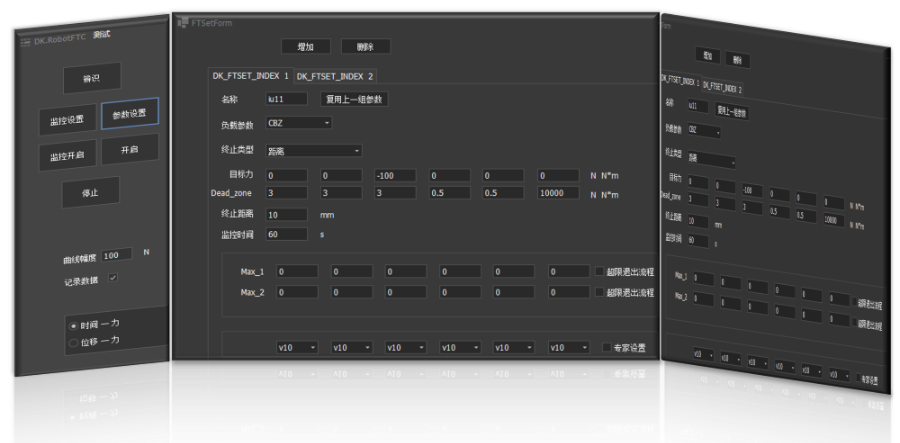
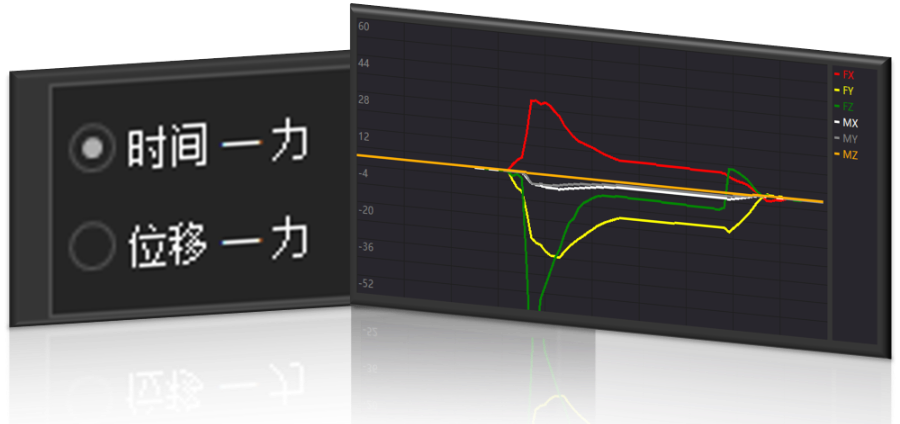
機器人力控不僅限于硬件上的技術(shù)提升,它在操作界面的智能化方面也有很大進展。隨著機器人技術(shù)的發(fā)展,越來越多的企業(yè)開始使用智能化的操作界面來監(jiān)控和控制生產(chǎn)過程。機器人力控技術(shù)集成了先進的數(shù)據(jù)采集與分析系統(tǒng),使得操作人員可以實時監(jiān)測機器人的工作狀態(tài),及時調(diào)整和優(yōu)化操作策略。這不僅降低了操作難度,還提高了生產(chǎn)管理的效率和準(zhǔn)確性。達寬科技的機器人力控解決方案通過簡化操作流程,提供直觀易懂的操作界面,使得生產(chǎn)過程中對機器人的控制更加便捷,為企業(yè)提升了生產(chǎn)過程中的智能化水平。上海協(xié)作機器人力控調(diào)試