
�ӱ��C�������؈�r �Ϻ��_���Ƽ�����
�l(f��)؛���c���Ϻ����֖|� ^(q��)
�l(f��)���r�g��2025-03-24

�l(f��)؛���c���Ϻ����֖|� ^(q��)
�l(f��)���r�g��2025-03-24
�S���f(xi��)���C���ˣ�cobot�����ռ����C�����c��ĺ����ѳɞ�F(xi��n)������I(y��)����Ҫڅ�ݡ��C�������ؼ��g���@�N�����аl(f��)�]�����P��Ҫ�����á�ͨ�^���_���ƙC����ʩ�ӵ��������C�����܉���Ӱ�ȫ����(w��n)�����c������T��ͬ�������C�������ؼ��g���Ԍ��r��֪�����h(hu��n)����׃��������C�����c��l(f��)��������ײ���Ķ����φT���İ�ȫ��ͬ�r���C�����܉�����Ҫ�r�pС������������������_���Ƽ��ęC��������ϵ�y(t��ng)�ṩ�˸����`��ąf(xi��)��ģʽ��ʹ�ÙC�����c���֮�g����ϸ��Ӹ�Ч�����C������I(y��)�����������ܻ������a(ch��n)�h(hu��n)�����C�������ؼ��g�����a(ch��n)�h(hu��n)�������˸��ߵ��`���ԣ��_���Ƽ�������I(y��)�������s��׃�Ĺ����΄ա��ӱ��C�������؈�r

�_���Ƽ��ęC��������ϵ�y(t��ng)ܛ��֧�փɷN���a����ͣ��ṩȫ������\�Ӆ���(sh��)�O�ã����w�������ɶȣ��_���C�����ڸ��N�����h(hu��n)���ж��܌��F(xi��n)���_���ơ�ͨ�^�xȡ����������(sh��)��(j��)��ܛ��ʹ�ÙC�����܉r�{��λ�ú��ˑB(t��i)���_�����I(y��)�^�̵ľ��_�ͷ�(w��n)�����_���Ƽ��ęC��������ܛ������λ��-���͕r�g-���ɷN�O(ji��n)��ģʽ��ͨ�^���r��λ�O(ji��n)�y���g�����r������λ�õ�С׃�����_���b���^���е�ÿһ���������_������֮����ͬ�r���Լ����R�e���m����푑��^���еĮ������ṩ�˸��ߵ��b�侫�ȺͿ���������ͨ�^���m(x��)�O(ji��n)�y���܉��A���͜p������λ�`��µ��|�����}���Ķ����C�L�ڷ�(w��n)���ĸ��|��ݔ��������C�������ش�ĥ�C��������ϵ�y(t��ng)ͨ�^�����{��(ji��)���������_���Ƽ��C���ˈ�(zh��)���΄Օr���Ӹ�Ч���p���˕r�g���M��

�ڸ߾���Ҫ��������ИI(y��)���㲿���b��ľ��Ȍ��K�a(ch��n)Ʒ�|�����P��Ҫ���C�������ؼ��g�đ��ã�ʹ�ÙC�����܉_�{��(ji��)ʩ�ӵ������_��ÿһ���㲿�����b���^���ж����_������ĽӺ�����λ�ã������������^����^С�����µ��b���`������ھ��܃x������Ӯa(ch��n)Ʒ�Լ��Cе���I�C�������ؼ��g�ľ������܉�_���㲿�����������ϣ��p���ˮa(ch��n)Ʒ�ķ����ʡ��_���Ƽ��ęC��������ϵ�y(t��ng)�����H���������a(ch��n)�^����ÿ���h(hu��n)��(ji��)�ľ��ȣ�߀�_�����������a(ch��n)���ķ�(w��n)���\�У���(y��u)���˽K�a(ch��n)Ʒ���b���|����
�ڬF(xi��n)�a(ch��n)�У��a(ch��n)Ʒ�|����һ��������I(y��)��������֮һ���C�������ؼ��g�܉�ͨ�^���_�{��ʩ�����_��ÿ���a(ch��n)Ʒ�����χ�����|��Ҫ���c�˹�������ȣ��C���������܉�p���˞��`��_���C�����ڈ�(zh��)���؏����΄Օrʼ�K���ַ�(w��n)���IJ��������@��ζ�����oՓ�nj����Ԫ���ĽM�b��߀�nj���܇�㲿���Ĵ�ĥ���C�������ض��܉��ṩ�O�ߵľ��ȣ��p���|�����ӣ��_��ÿ���a(ch��n)Ʒ��һ���ԺͿɿ��ԡ��_���Ƽ��ęC�������ؼ��g���{���侫�_�Ŀ����������V�������ڶ����ИI(y��)��������I(y��)�_��ÿһ���a(ch��n)Ʒ�����ϸߘ˜ʣ������ˮa(ch��n)Ʒ���Ј������������ÙC�������أ��_���Ƽ����a(ch��n)���ڸ�ؓ���\�D�����f���ָ�Ч�ʣ���͑�����(w��n)�������a(ch��n)���ڡ���
�ڬF(xi��n)�����I(y��)�Ԅӻ��I�C�������ؼ��g�đ������棬�����ھ����b�����I(y��)�аl(f��)�]���P�I���á����s�C�ڬF(xi��n)�����I(y��)���t(y��)������Դ�ͽ�ͨ�ȶ����I���а��������ɻ�ȱ�Ľ�ɫ�����s�C����z�����b����Ҫ�߾��Ⱥ��m��?sh��)������ƣ��Դ_���z���c���֮�g���ܷ��ԺͽY�������ԡ��@һ�^�̲��HҪ��C�����܉_��λ��߀Ҫ�����܉��֪���m���z���c���֮�g�Ľ��|�����Ķ����F(xi��n)ƽ���Ұ�ȫ���b�䡣�_���Ƽ��ęC��������ϵ�y(t��ng)�ѳɹ���ض���^�����s�C�S�ң��������b�����z���^�̵��Ԅӻ������ܻ�����(sh��)�ֻ����졣�_���Ƽ��ęC�������ؼ��g��(y��u)�������a(ch��n)�^�̣��_���ˮa(ch��n)Ʒ��ÿ���h(hu��n)��(ji��)�е�һ���ԣ��������|�����ơ����K�C�������ؾ����b��
�C��������(y��u)���˲������ȣ��_���Ƽ��Ľ�Q������͑��ṩ�˸�Ч�Ұ�ȫ�����a(ch��n)���̣��p���˲���Ҫ���L�U���ӱ��C�������؈�r
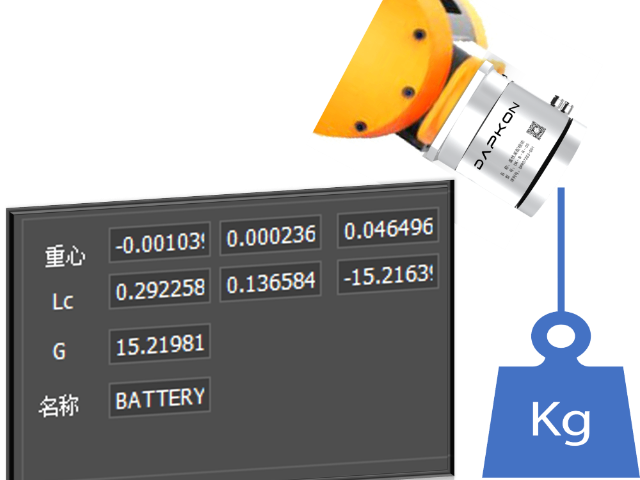
�����҂�����KUKA���I(y��)�C���˞�������B��λ����_��ƽ�_���C�������ش��X�b����܇ECU���������^35p���������ȣ�ʹ�ù�������ϵ���_ʾ�̾����ӿڵij�ʼλ�á�35��_�B�������䱊�����_���^��Ľ��|��e���ڂ��y(t��ng)�b���^���Е��a(ch��n)���^��ĸɔ_�������@���HҪ��C���˾��ИO�ߵ��b�侫�ȣ������b���^���еĸɔ_����Ҳ�������Ӱ푡����磬���b���^���У����������`���ԭ�C����ʩ���^����������Гp���B�������L�U������ڲ��p���B������ǰ���£����_�،������B�ӵ�ָ��λ�ã��ڜyԇ�^���У��҂��l(f��)�F(xi��n)��هλ���Д���܌����ڹ��bƫ�ƻ��`��r�p���B����������ه���Д������ɔ_�����`�ж��J���ѵ��_ָ��λ�ã����@�N�����ܴ_���B�������ܓp����������ȫ�ԡ���ˣ��Y��λ�ú������p���Д��Ǹ��鷀(w��n)�Ľ�Q�������ӱ��C�������؈�r




